Choosing
Point on elements to get information.
Flying
Spread your fingers to fly. Pitch and roll your hand to control the quadcopter
Going back
Swipe with your whole hand to get to the previous Screen.
Touch down
Make a fist to enter exploration mode.
Interactive Quadcopter Simulation
Choosing
Point on elements to get information.
Flying
Spread your fingers to fly. Pitch and roll your hand to control the quadcopterBRUSHLESS MOTOR
Motorstructure and Function
This brushless motor is in a outrunner configuration, which means that the rotating shaft is attached to the cylinder casing (metal part) with the magnets (blue part). So all these parts are moving while the coils (red part) are always fixed. The wires from the ESC go directly into the coils. By supplying these, commonly three, wires with different voltages, one can create a desired magnetic field. This magnetic field pushes and pulls the magnets in the cylinder casing in a direction thus resulting in a rotation of the shaft.Brushless vs. Brushed motor
The coils in the brushed motors which create the magnetic field are rotating. This means one can’t just connect them directly with cables like in the brushless motor. To address this problem a commutator is used, which are contacts fixed to the rotation shaft and connected to the coils. As the shaft rotates, other contacts get connected and the magnetic field of the coils change. Though the brushless motors do not have a brush on the shaft which takes care of switching the power direction in the coils, and this is why they are called brushless. Generally brushless motors spin in much higher speed and use less power at the same speed than DC motors. Also brushless motors don’t lose power in the brush-transition like the DC motors do, so it’s more energy efficient.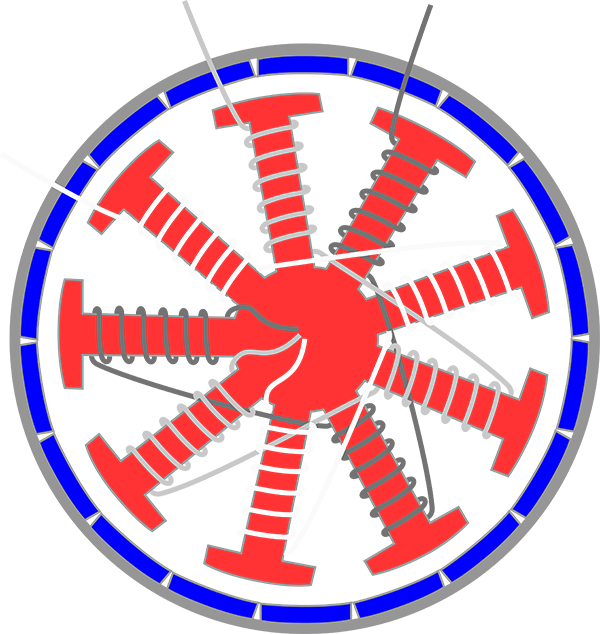

ROTOR
The rotors are not spinning in the same direction, rotors one and three rotating clockwise and rotors two and four counterclockwise. This is why the rotorpairs have different shapes. The size is in relation to the weight of the quadrocopter. The material normally consists of plastic, reinforced carbon or carbon fiber. That depends on
the way it is used.
The different Shapes
1 and 3
2 and 4

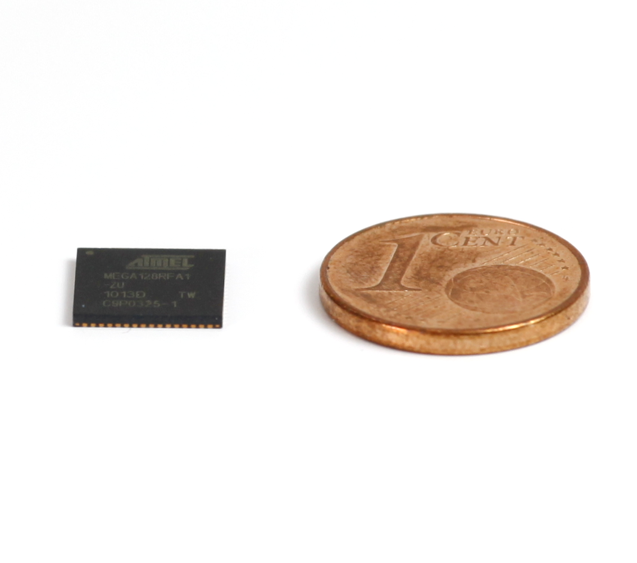
MICROCONTROLLER
The microcontroller is the brain of the quadcopter. It collects all the information from the sensors and calculates the quadcopters position and rotation in space. The quadcopter can be controlled by a remote control or can be programmed with predefined routes. Either way the microcontroller knows the state (position & rotation) in which the quadcopter should be. Now it takes this desired value and compares it to the actual value. With the difference between these two values in mind, the microcontroller tells the Electronic Speed Controller how the motors should spin.
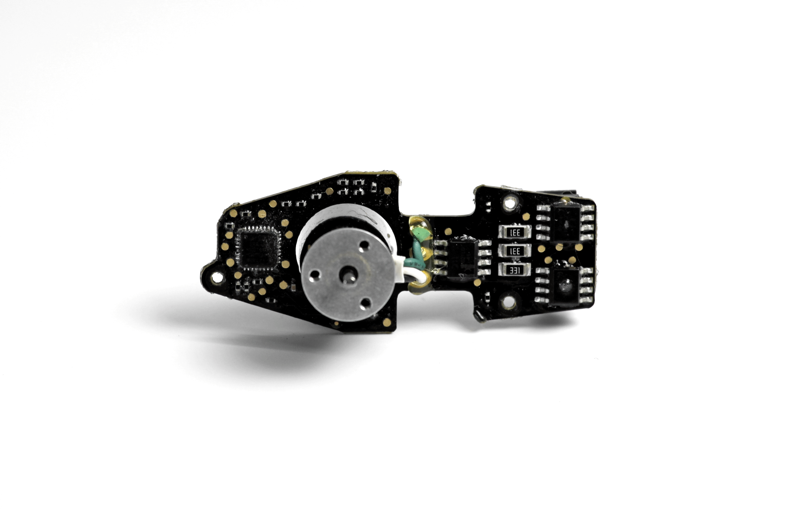
ELECTRONIC SPEED CONTROLLER
A ESC, short for Electronic Speed Controller, is required to run a brushless motor. These motors, often used in quadcopters, need electronically-generated three phase electric power. In comparison to brushed motors which only need a DC (direct current) power source.
The ESC receives a control signal from the microcontroller and sends out high power signals to the brushless motor. These signals are usually generated by rapidly switching field effect transistors. This way the ESC can vary the electronic motor’s speed and also its direction. It’s not uncommon to have a ESC which can handle up to 20 Amperes.
The ESC receives a control signal from the microcontroller and sends out high power signals to the brushless motor. These signals are usually generated by rapidly switching field effect transistors. This way the ESC can vary the electronic motor’s speed and also its direction. It’s not uncommon to have a ESC which can handle up to 20 Amperes.
INERTIAL MEASUREMENT UNIT
The gyroscope and accelerometer are electronic sensors for measuring the velocity, orientation and gravitational forces of the quadcopter. These measurements allow the microcontroller to calculate the changes in the motor speeds.
The 3-axis accelerometer and 3-axis gyroscope are here united in one chip and represent together 6 degrees of freedom (DOF).
The accelerometer measures acceleration and also force, so the downwards gravity will also be sensed. As the accelerometer has three axis sensors, we can work out the orientation of the device.
A gyroscope however measures angular velocity, in other words the rotational speed around the three axis.
Using Only Accelerometer?
With the accelerometer alone, we should be able to measure the orientation with reference to the surface of earth. But the accelerometer tends to be very sensitive and unstable sometimes, when motor vibration is bad, it could mess up the orientation. Therefore we use a gyroscope to address this problem. With both the accelerometer and gyroscope readings we are now able to distinguish between movement and vibration.Using Only Gyroscope?
The gyroscope tends to drift a lot, which means that if you start rotating the sensor, the gyroscope will output the angular velocity, but when you stop it doesn’t necessarily go back to 0 deg/s. If you then just used the gyroscope readings you will get an orientation that continues to move slowly (drifts) even when you stopped rotating the sensor. This is why both sensors has to be used together to calculate a good and useful orientation.
BATTERY
Most quadcopters have LiPo batteries. They are very light which is the most important factor. It's also possible to use NiMH Batteries, they are cheaper but also a lot heavier.
Battery Voltage
LiPo battery can be found in a single cell (3.7V). The most common battery for a quadcopter is the 3SP1 battery which means three cells connected in series which results in 11.1V.Battery Capacity
A good rule of thumb is with 1KG of total weight a battery with at least 4000mAh and 11.1V is required. This battery / weight ratio will result in ~5 minutes of full trottle flight or ~15 minute hover flight.Battery Discharge Rate
Another important factor is the discharge rate which is specified by the C-value. The C-value together with the battery capacity indicates how much current can be drawn from the battery.Maximum current that can be sourced can be calculated as:
MaxCurrent = DischargeRate x Capacity
For example if there is a battery that has a discharge rate of 15C and a capacity of 4000 mAh than this battery will be able to source a maximum of 15C x 4000mAh = 60A. So in this case the total amount of current drawn by the motors should not exceed 60A.
